ydsolve – additional math algorithms
Functions
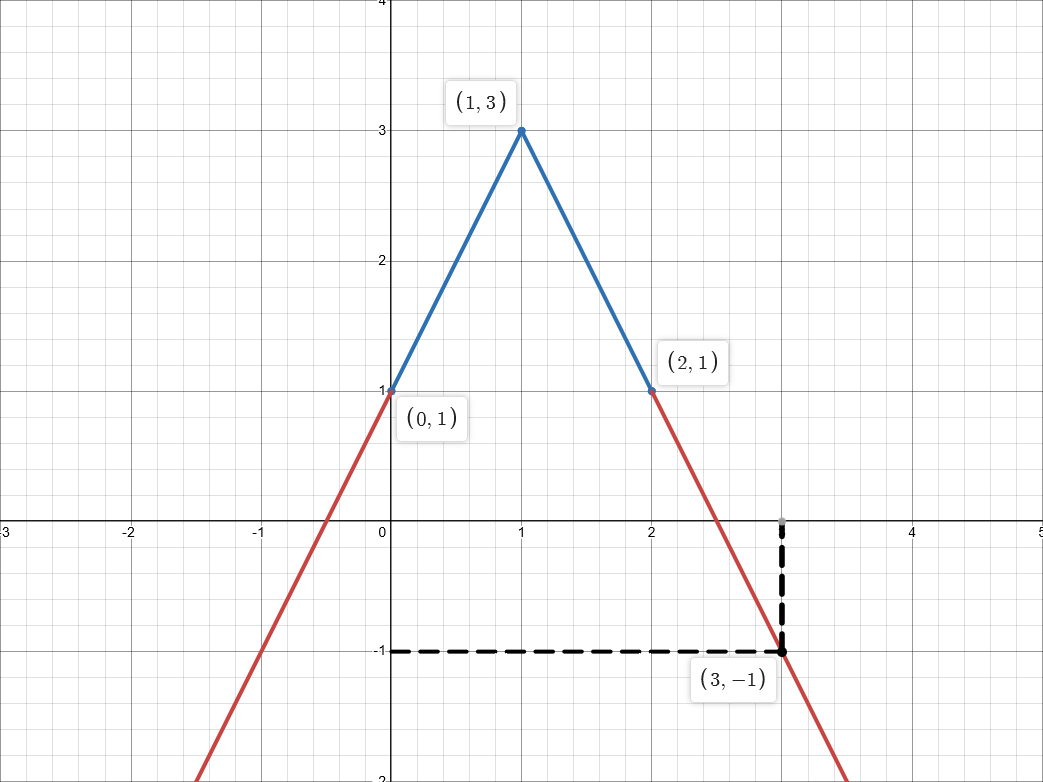
- ydsolve.interp(ys, xs, x)
Linear interpolation/extrapolation between specified points.
Extrapolation is based on 2 closest to
xpoints.Prerequisites:
Lists
ysandxsmust be the same size;Lists
ysandxsmust contain at least 2 points;List
xsmust contain ascending or descending values (list is not checked to save performance).
Usage examplefrom ydsolve import interp # sample points (x, y) Xs = [0, 1, 2] Ys = [1, 3, 1] x = 3 y = interp(Ys, Xs, x) print(y) # -1
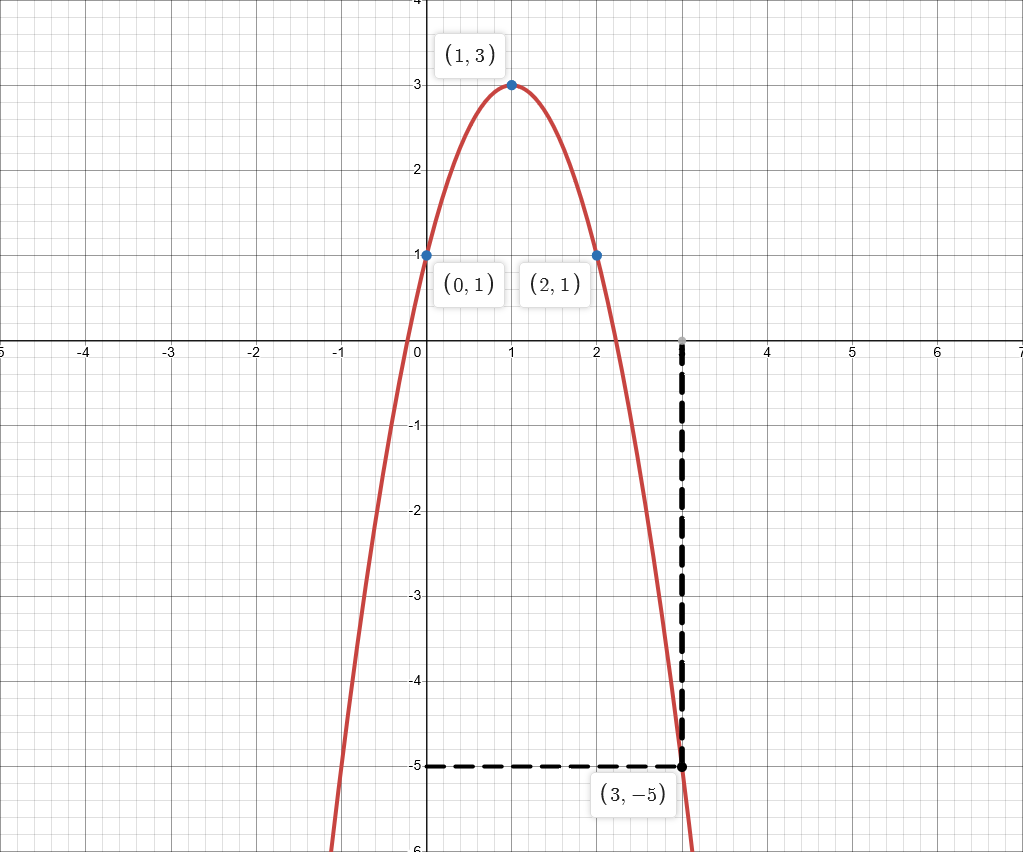
- ydsolve.calcpoly(ys, xs, rows=3)
Calculates polynomial coefficients using list of predefined points (
x,y).You need at least
rowsnumber of sample points to calculate polynomial coefficients.
- ydsolve.evalpoly(coeffs, x)
Evaluates polinomial at
x.Usage examplefrom ydsolve import calcpoly, evalpoly # sample points (x, y) Xs = [0, 1, 2] Ys = [1, 3, 1] poly = calcpoly(Ys, Xs, 3) # calculate polynomial coefficients print(poly) # (1.000001, 3.999993, -1.999996) floating point precision limitation # evaluation x = 3 y = evalpoly(poly, x) print(y) # -4.99999 y = poly[0] + poly[1]*x + poly[2]*x*x print(y) # -4.99999, the same calculation as evalpoly()
Classes
- class ydsolve.LeastSqr(rows=3)
Solves a linear system using the method of least squares. Can be useful for calibrating external sensors.
The number of parameters in the linear system is defined by
rows. Supported range: [2..16]. Performance will be noticeably reduced if more than 5 parameters are used.Usage exampleimport ydsolve # Sample points Ys = (3, 5.1, 9.8, 13.3) Xs = (1, 2, 3, 4) # Class example ls = ydsolve.LeastSqr(rows=3) ls.addpoly(Ys[0], Xs[0]) ls.addpoly(Ys[1], Xs[1]) ls.addpoly(Ys[2], Xs[2]) ls.addpoly(Ys[3], Xs[3]) coeffs = ls.solve() print(coeffs) # (0.6500188, 1.809981, 0.3500038) # Polynomial usage x = 2.5 y = coeffs[0] + coeffs[1]*x + coeffs[2]*x*x print(y) # 7.362495 # Method example coeffs2 = ydsolve.calcpoly(Ys, Xs, 3) print(coeffs == coeffs2) # True
Methods
- init(rows=3)
Reinitialize the solver using the specified number of parameters.
- Parameters:
rows (int) – Number of parameters. Range: [2..16].
- reset()
The solver will be reset to its initial state, removing all added samples. The number of parameters will remain unchanged.
- add(y, x1, x2[, x3[, x4[, x5[, ...]]]])
Add a sample row to the calculation. The number of parameters is defined by the
rowsin the classconstructor.
- addpoly(y, x)
Used to calculate polynomial coefficients from predefined points.
Equivalent to:
add(y, 1.0, x, x*x, x*x*x, x*x*x*x, ...)
- solve()
Solves a linear system. The number of coefficients returned is determined by the
rowsin the classconstructor.